






















すべての製品
-
 Andres Blancoスラスターは正しく着きました。私はROVのそれらをテストし、私達は結果と非常に幸せです。エポキシの内部の終わりは非常によく、サイズに関連するモーターの力はかなりよいです。
Andres Blancoスラスターは正しく着きました。私はROVのそれらをテストし、私達は結果と非常に幸せです。エポキシの内部の終わりは非常によく、サイズに関連するモーターの力はかなりよいです。 -
グレゴアールLange常州のビック技術モーター技術と私達の会社間の協同はちょうど大きかったです。私達の必要性のよい理解、私達の問題を解決することを大きい決定。私は推薦します!
-
デイヴィッドMolevelt専門および明確なコミュニケーション。順序は時間に出荷されました。郵送物に加えられてところ反対のコネクター。私達が同意したように運転者の仕事!
-
Buildstormの私用限られたプロダクトは、それきちんと詰まりました予想通り働きます。販売人は非常にすぐに答え、購入の決定で助けます。それらはあなたのためのプロダクトをカスタマイズして準備ができています。
-
Ashley Griffin郵送物は非常にすぐに受け取られました。プロダクトは包装によってよく保護されました。会社repは誠心誠意および親切でした。評価とA!
3V 12VDCの手動ボタンが付いているマイクロ ステッピング モーターの運転者のコントローラー








商品の詳細
| モーター タイプ | ステッピング モーター | 電圧 | 3~12V DC |
|---|---|---|---|
| ハイライト | 12VDCステッピング モーターの運転者のコントローラー,3VDCステッピング モーターの運転者のコントローラー,12VDCステッピング モーターの運転者板 |
||
製品の説明
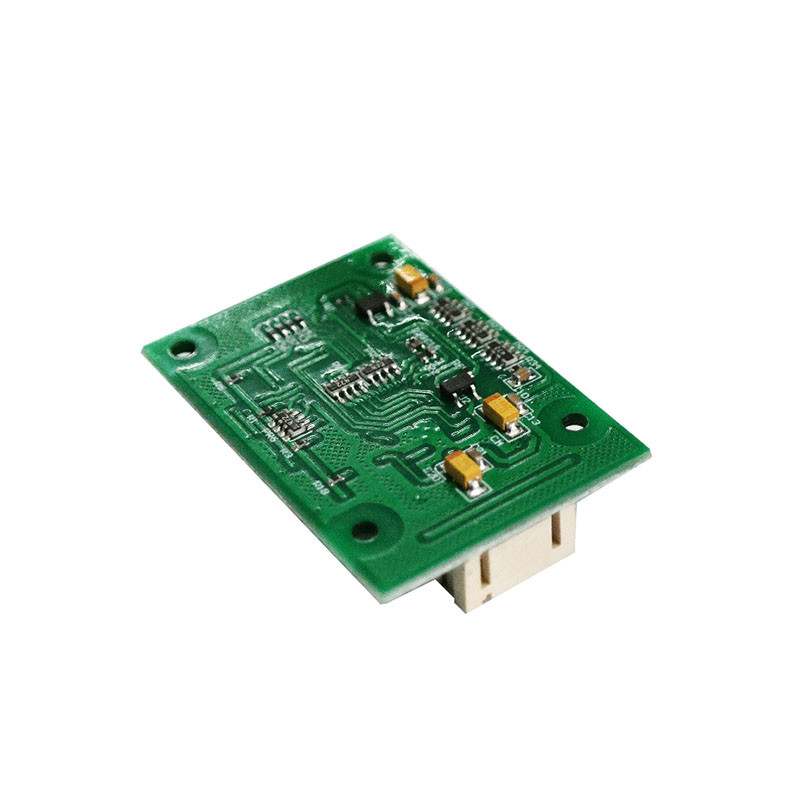
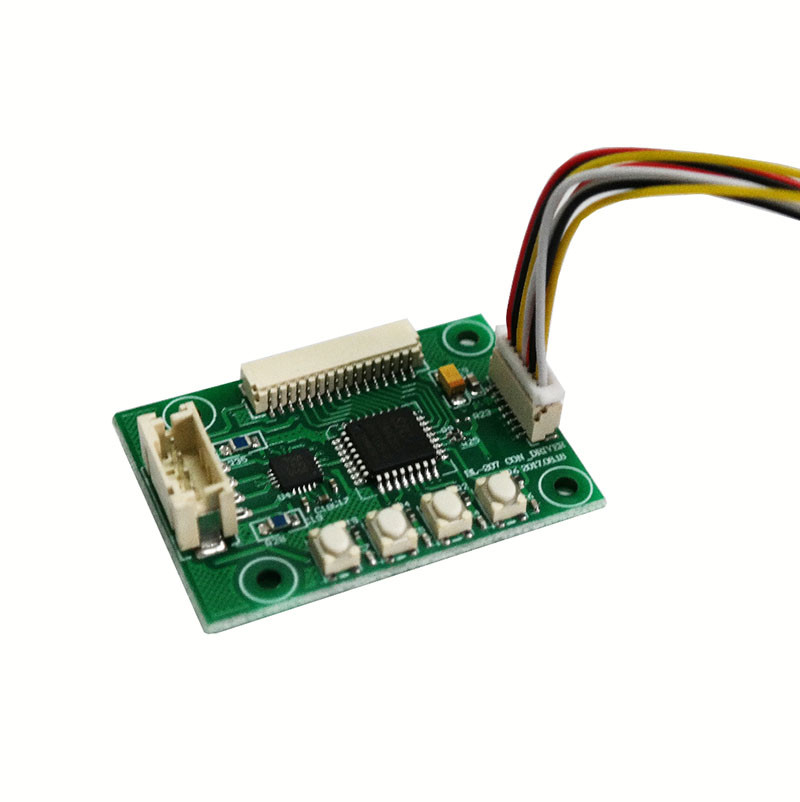
PM4_207手動ボタンが付いているマイクロ ステッピング モーターの運転者のコントローラー
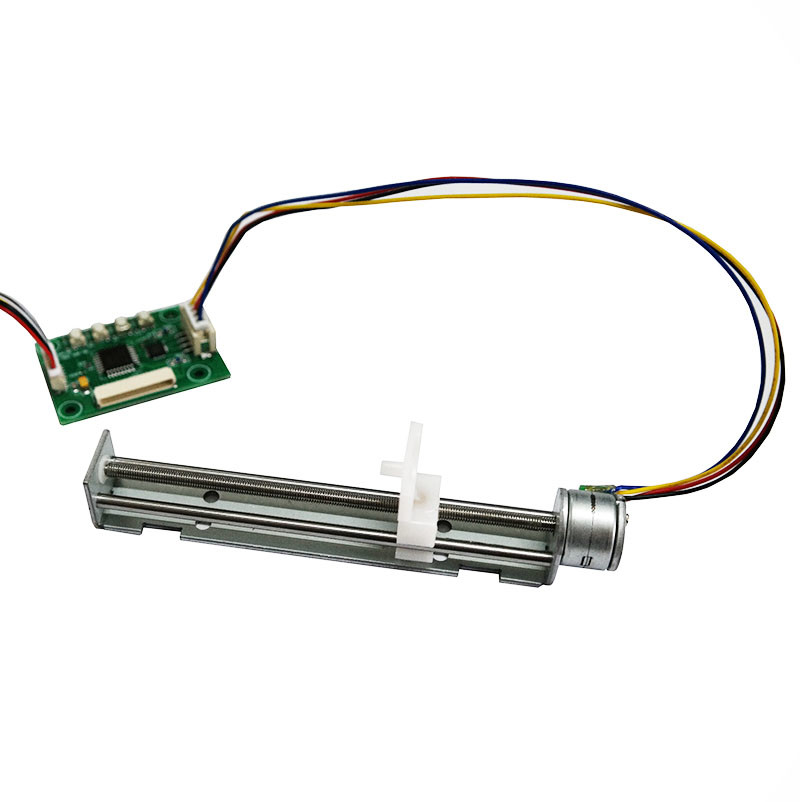
これは私達の207ステッピング モーターの運転者、それ使用した手動ボタンが付いている2フェーズ ステッピング モーターを制御するのにである。作動の電圧はあなたが使用するモーターの評価される電圧によって3Vから12V DCに、決まるある。
この運転者とモーターを接続できる2.0mmのコネクターがある。
A.モーター(A+ /A- /B + /B-):
モーター アクセス ポート:
A+ /A-は段階Aを自動車に乗るために接続する
B+ /B-は段階B.を自動車に乗るために接続する。
また力の製造者と接続する、およびDIR、CPの信号発電機からのEN信号がある6つの港
- 力および制御信号の投入口:
(入力信号のレベル≤DC 5V)
1. VCC入力ターミナルDC:3-12V、(モーターの必要性に従って実際の入力電圧を選びなさい。)
- GND力の否定的なターミナル
- 3.3Vドライブ管理委員会の出力
- CP DIR ENは入力信号を次のとおりである:脈拍、方向は、入力信号の上でである入会地可能になる
ENは= 1 (浮遊)、モーター自動オフライン状態を書き入れる、モーターは5秒の間停止の後でオフラインになり、モーター巻上げは力を失う。
ENは= 0 (基づいている)、モーター強制される可能にする国家を入る。モーターが/静止した動いているとき、モーター巻上げは常に活気づく。
- 下記によって:予備の港
- 入力信号はである共通の陰極の関係(ieの入会地の入力)
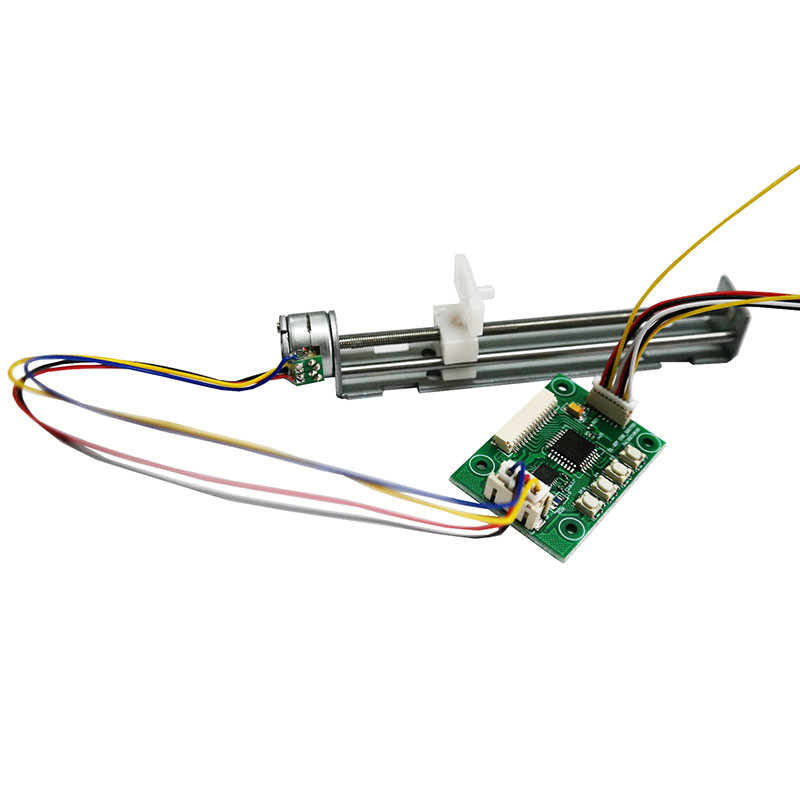
VCCのとこのモーターを接続、GNDの港、こうすれば、ボタンの組合せを用いるこのモーターを制御できる
このモーターを使用する他の方法は信号発電機によってこの運転者を接続することである従って他のコントローラーから信号を受け取ることができる。
![]()
キーボードの記述:
(Q:起動キー、T:停止キー、A:かちりと言う音の前方キー、D:背部主をかちりと鳴らしなさい、
:主出版物、:主解放)
| いいえ。 |
ボタンの組合せ
|
記述 |
| 1 | = | モーターが停止にあるとき、かちりと言う音のキーを押せば、モーターは手動で先に動き始める; |
| 2 | A+Q= | モーターが停止にあるとき、出版物A + Qのキー、およびモーターは手動で先に加速し始める; |
| 3 | A+T = | モーターが停止にあるとき、出版物A+Tボタン、およびモーターは前方方向で手動で減速し始める; |
| 4 | D = | モーターが停止にあるとき、出版物Dボタンおよびモーターは反対方向で手動で動き始める; |
| 5 | D+Q= | モーターが停止にあるとき、かちりと言う音をD + Qのキー押せば、モーターは加速反対方向を手動で始める; |
| 6 | D+T = | モーターが停止にあるとき、かちりと言う音をD + Tのキー押せば、モーターは反対方向を手動で減速し始める; |
| 7 | Q = | モーターが停止にあるとき、出版物Qボタンおよびモーターは自動的に動き始める; |
| 8 | = | モーターが自動的に動いている場合、出版物Aのキーおよびモーターは加速し始める; |
| 9 | D = | モーターが自動的に動いている場合、出版物Dボタンおよびモーターは減速し始める; |
| 10 | Q+A= | モーターが自動的に動いている場合、出版物Q +キー、およびモーターは自動的に動き始める; |
| 11 | Q+D= | モーターが自動的に動いているとき、出版物Q + Dの背部ボタン、およびモーターは逆で自動的に動き始める; |
| 12 | T+A (またはT+D) = | モーターが停止、出版物にT + Aあるとき(またはT + D)キーおよびモーターは手動で自動周期ランニングの間隔を置き始める; |
| 13 | T+Q= | モーターが停止にあるとき、出版物T + Qボタン、およびモーターは手動で一定の間隔に従って自動的に交換する; |
| 14 | = | モーターが交換周期で動いているとき、周期を交換するモーターを加速するためにキーを押しなさい; |
| 15 | D = | モーターが交換周期で動いている場合、出版物Dボタンおよびモーターは交換周期で減速する; |
| 16 | Q+A= | モーターが交換周期で動いている場合、出版物Q +キー、およびモーターは前方方向で交換する; |
| 17 | Q+D= | モーターが交換周期で動いている場合、出版物Q + Dのキー、およびモーターは逆で交換する; |
| 18 | T = | モーターが動いている時、モーターを停止する出版物Tボタン。 |
|
注目
|
組合せのキーは、与えられる順序を機能実行することができる押す | |
プロダクト表示
![]()
![]()
(1)ステッピング モーターおよび段階的なドライブは何であるか。
ステッピング モーターは特に速度および位置の精密な制御のために設計されている特別なモーターである。その回転は固定角度で(「ステップ角度」と呼ばれる)一歩ずつ作動する、従ってそれはステッピング モーターと呼ばれる。その特徴は、コントローラーから送られるあらゆるパルス信号受け取られる集められた間違いがないことであり、モーターは運転者のドライブの下で固定角度で動く、従ってさまざまな開ループ制御で広く利用されている。
ステップの運転者はステップ・モータを作動できる電力増幅器である。それはステップ・モータの力信号にコントローラーによって送られるパルス信号を変えることができる。モーターの速度は脈拍の頻度に比例している、従って制御脈拍の頻度は正確に調節することができる。速度は、制御脈拍の数正確に置くことができる。
(2)ドライブの故障は何であるか。
ステッピング モーターは自身の独特な構造によって定められ、「モーターの固有のステップ角度は」工場で(1.2°/0.6°のような)示される。但し、多くのに精密制御および機会は、全ステップの角度余りに大きく、制御精度に、および影響を与える
振動は余りに大きい。従って多くのステップのモーターの固有のステップ角度を完了することを、要求する。これは下位区分ドライブと呼ばれ、この機能を実現できる。電子デバイスは下位区分の運転者と呼ばれる。
(3)下位区分の運転者の利点は何であるか。
各ステップを渡したステップ角度が減るので、ステップ均等性は改善される、従って制御正確さは改善することができる。
モーターの振動は非常に減らすことができる。低頻度の振動はステッピング モーターの固有の特徴である。下位区分はそれを除去する最もよい方法である。
それは効果的にトルクのさざ波および増加の出力トルクを減らすことができる。
これらの利点はユーザーによって一般に確認され、それらに利点を持って来る、従って下位区分の運転者を使用することが推薦される。
(4)唯一の仕事はなぜ私のモーターを1方向のするか。
- 可能な方向信号は方向現在の制限抵抗器を燃え尽きるには余りにも弱い、またはワイヤーで縛る極性は間違っている、または信号の電圧は余りにも高い。
-
脈拍モードはこのモードに、信号である脈拍/方向、運転者置かれなければならない一致しない;信号がCW/CCW (倍パルスモード)なら、運転者はまたこのモードにあるなる他ではモーターは1方向だけで動く。
推薦されたプロダクト