






















すべての製品
-
 Andres Blancoスラスターは正しく着きました。私はROVのそれらをテストし、私達は結果と非常に幸せです。エポキシの内部の終わりは非常によく、サイズに関連するモーターの力はかなりよいです。
Andres Blancoスラスターは正しく着きました。私はROVのそれらをテストし、私達は結果と非常に幸せです。エポキシの内部の終わりは非常によく、サイズに関連するモーターの力はかなりよいです。 -
グレゴアールLange常州のビック技術モーター技術と私達の会社間の協同はちょうど大きかったです。私達の必要性のよい理解、私達の問題を解決することを大きい決定。私は推薦します!
-
デイヴィッドMolevelt専門および明確なコミュニケーション。順序は時間に出荷されました。郵送物に加えられてところ反対のコネクター。私達が同意したように運転者の仕事!
-
Buildstormの私用限られたプロダクトは、それきちんと詰まりました予想通り働きます。販売人は非常にすぐに答え、購入の決定で助けます。それらはあなたのためのプロダクトをカスタマイズして準備ができています。
-
Ashley Griffin郵送物は非常にすぐに受け取られました。プロダクトは包装によってよく保護されました。会社repは誠心誠意および親切でした。評価とA!
みみずの変速機が付いているカスタマイズされたDシャフト35HS42 NEMA 14の35mm雑種のステッピング モーター








商品の詳細
| エンジンの種類 | ハイブリッドギアステッパーモーター | 変速機のタイプ | みみずの変速機 |
|---|---|---|---|
| モーターサイズ | 35mm (NEMA 14) | モーターの高さ | 42mm (調節可能) |
| 変速機の比率 | 49:1 (調節可能な) | ステップアングル | 1.8°/gear比率 |
| ハイライト | 35mmの雑種のステッピング モーター,ワームギアボックスハイブリッドステップモーター,Dのシャフトによって連動させられるステッピング モーター |
||
製品の説明
カスタマイズされたDシャフト35HS42 NEMA 14 35mmハイブリッドステップモーター
記述:
35mm NEMA 14ハイブリッドステップモーター ワームギアボックス
モーターとギアボックスにはマウントプレートがある.
ステップモーターの高さは 42mmで 選択できる高さは複数あります
速度は 49 です.1客の速度とトルク要件に基づいて調整できます.
軸長もカスタマイズできます
軸の長さも調整できます
パラメーター:
| エンジンの種類 | ハイブリッドステップモーター+ワームギアボックス |
| モデル番号 | 35HS42+634JSX49 |
| ステップアングル | 1.8度 |
| 抵抗力 | 4Ω/相 |
| 定数電流 | 1A/フェーズ |
| モーターの高さ | 28 / 34 / 42 mm |
| ギア比率 | 49:1 |
| 出力シャフト長 | 15mm |
設計図:
![]()
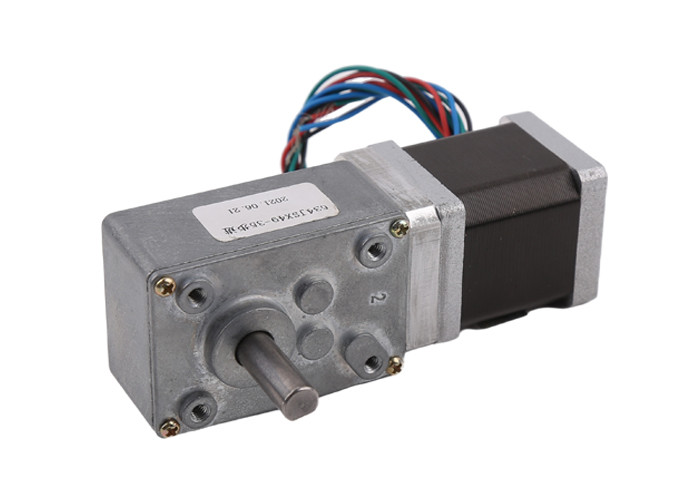
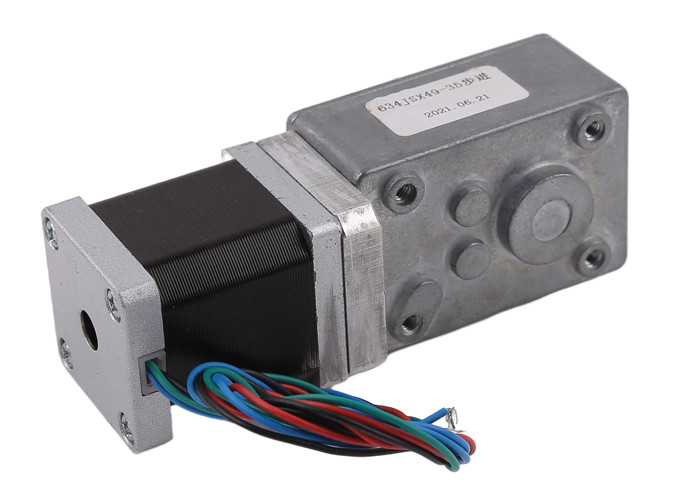
製品表示:
![]()
ステップモーターの用途:
ステップモーターは精密制御に使用され,医療機器,3Dプリンター,工業精密制御,自動化機器などに広く使用されています.
ステップモーターは,精密な制御と回転/線形運動を必要とするすべてのメカニズムで使用できます.
![]()
ステップモーターの利点
ステップモーターは,閉ループエンコーダー / フィードバックシステムなしで正確に制御することができます. また,彼らは電気刷毛がない.電磁気干渉や電気の火花の問題はありません.ブラシ付きモーター/ブラシなしモーターを入れ替えます.
ステップモーターは運転手によって簡単に制御され,この特徴は精密な制御の分野で重要な地位を確立します.
1精密な制御が可能 プログラム可能
2電磁気干渉と電気の火花なし
3サイズも小さい
4合理的な価格
5低騒音
6. 長い使用寿命
ハイブリッドステップモーターに関する注釈:
顧客は,まずステップモーターを選択し,既存のステップモーターに基づいてドライバーを選択する原則に従うべきです.
ハイブリッドステップモーターを動かすにはフルステップ運転モードを使用しない方がよい.フルステップ運転では振動が大きい.
ハイブリッドステップモーターは,低速の場合により適しています.我々は速度が1000rpm (6666PPS 0.9度),好ましくは1000-3000PPS (0.9度) を超えないことを提案します.速度を下げるためにギアボックスで固定することができますモーターは,適切な周波数で高効率で低騒音です.
歴史的な理由により,名目電圧12Vのモーターのみが12Vを使用します.設計図上の他の名目電圧は,モーターにとって最も適した駆動電圧ではありません.顧客は,自分の要求に基づいて適切な駆動電圧と適切なドライバーを選択する必要があります..
高速または大きな負荷で使用される場合,通常,作業速度で直接起動しません.我々は,徐々に頻度と速度を増加することを提案します.モーターはステップを失わない2つ目は 騒音を減らして 位置付けの精度を向上させることです
モーターは振動領域 (PPS600以下) で動作してはならない.もし低速で使用しなければならない場合,電圧,電流を変更したり,いくつかのダムリングを追加することによって振動問題を軽減することができます.
モーターが600PPS (0.9度) 以下の状態で動いている場合,電流が小さく,電感が大きく,電圧が低い状態で動かす必要があります.
大量の慣性モメントを持つ負荷では,大型のモーターを選択すべきである.
高精度が必要な場合は,ギアボックスを追加し,モーターの速度を増加させ,またはサブディビジョンドライブを使用することで解決できます.また,5相モーター (単極モーター) を使用できます.しかし,システム全体の価格は比較的高価ですめったに使われない
推薦されたプロダクト